Goal
Demonstrate fully autonomous tic-tac-toe on SO101.
Project detail
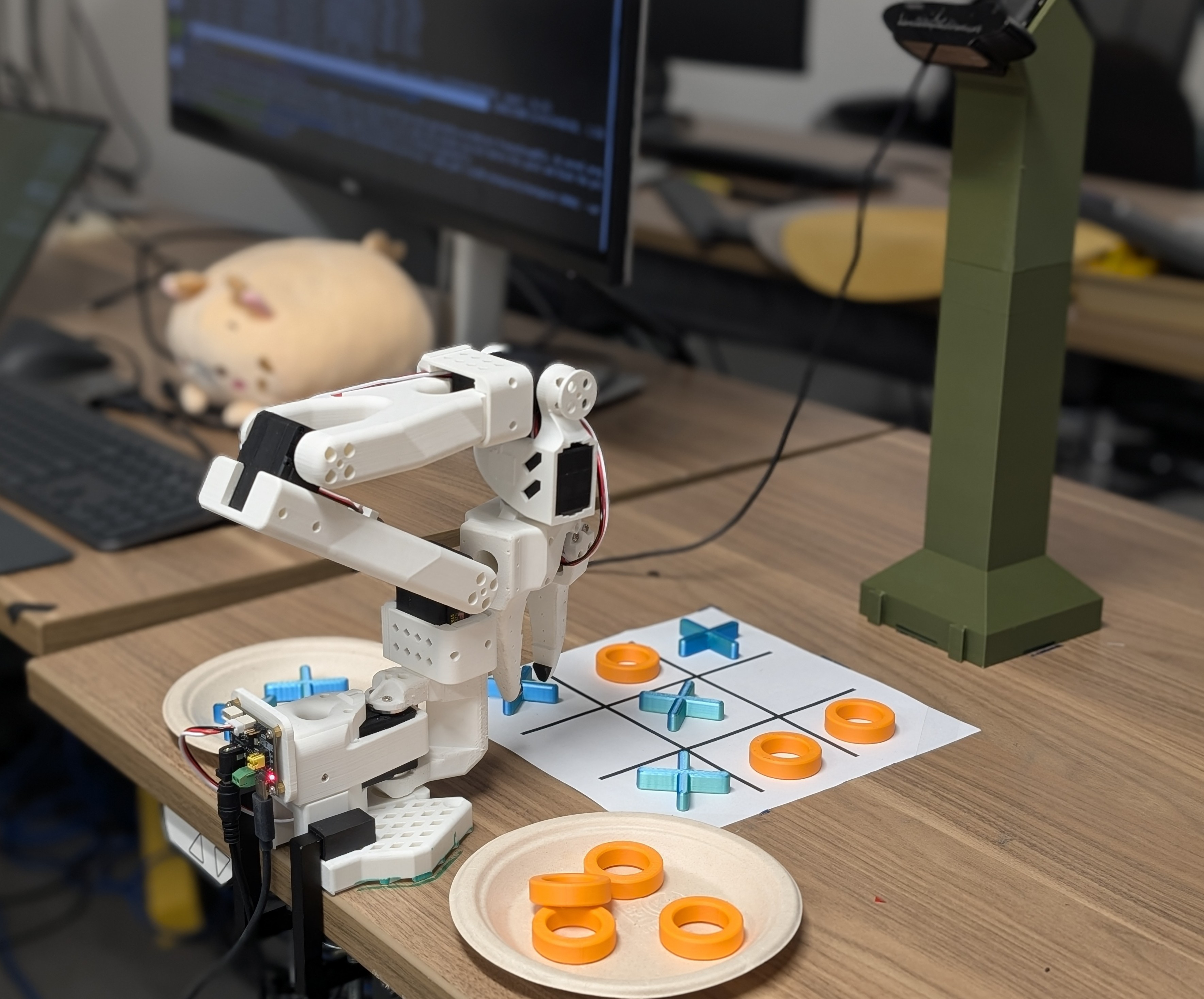
We are training the SO101 arm to autonomously play tic-tac-toe using GR00T 1.6 + a local VLM on Jetson Thor.
Mission
GR00T 1.6 and a lightweight local VLM are our current stack for perception, move selection, and execution. Tic-tac-toe is the primary benchmark before scaling to broader tasks.
Artifacts
External references and components.