Status
Archived after feasibility review and make-vs-buy decision.
Project detail
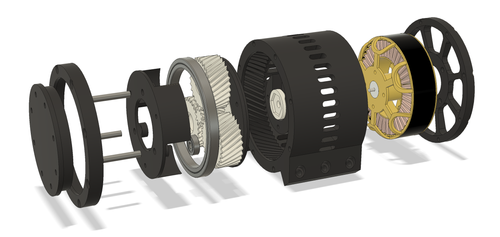
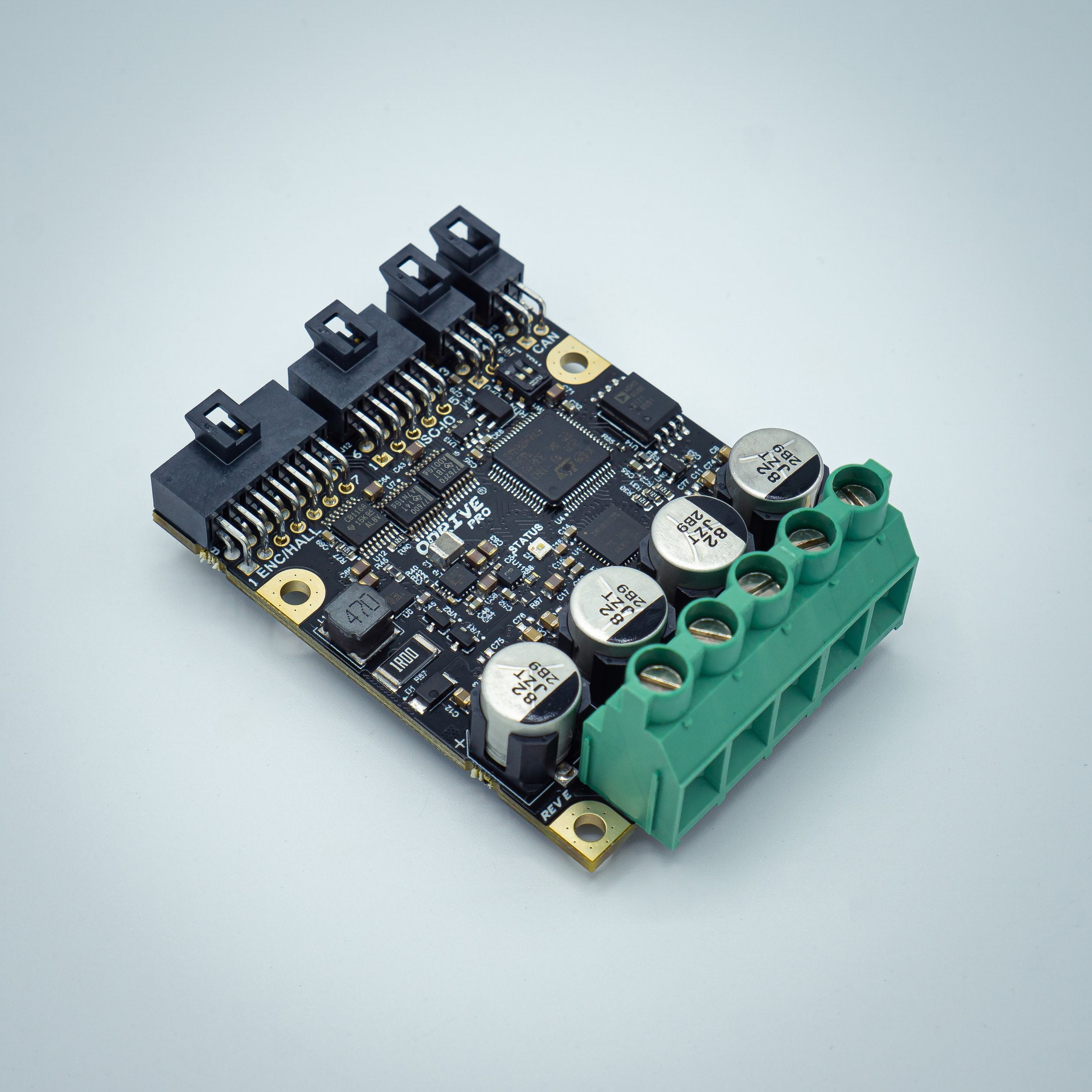
We designed a 3D printed cycloidal actuator prototype with a 10:1 reduction ratio using a FreeRCHobby 8318 motor and an ODrive Pro. Theoretical peak output torque was 50 Nm. The prototype was promising, but after a price and performance review against Robstride actuators, we ended the project and selected Robstride actuators for our humanoid build.
Overview
This project was a feasibility study for student-built humanoid actuators. The goal was not just to produce torque, but to understand whether a club-scale custom actuator program could beat an available commercial option on cost, performance, and development time. It gave our team hands-on experience in cycloidal drivetrain design, packaging, motor/controller integration, and engineering trade studies.
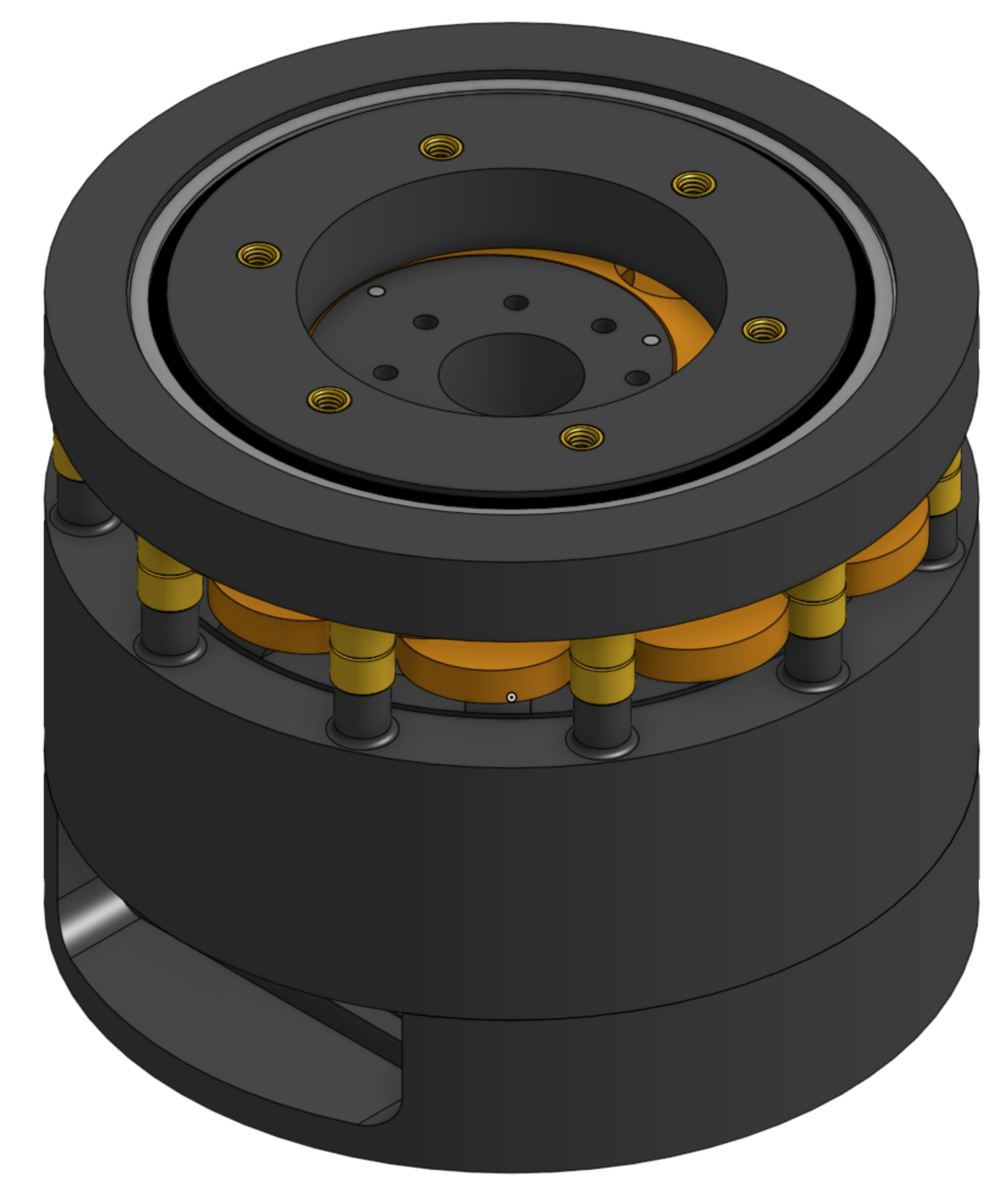
Compact cycloidal architecture designed for humanoid joint packaging with a 3D printed reduction stage.
High-power 8318 outrunner + ODrive Pro control stack for rapid bring-up and validation.
Evaluate price, expected performance, and schedule risk against Robstride actuator options.
Postmortem
We concluded that this actuator concept was not competitive with Robstride actuators for our current humanoid timeline. A fully custom actuator program could likely become competitive, but only with much deeper custom design work and a longer development schedule than our team can currently support.
The concept was technically promising and valuable for learning cycloidal actuator design, packaging, and subsystem integration constraints.
For our current schedule, the expected price/performance outcome did not justify continued iteration over commercial Robstride options.
Ending the project reduces schedule risk and lets the team focus effort on humanoid integration and higher-leverage subsystems.
Artifacts
External references and components.